Autonomous Vehicles Demand High-Quality Interconnect Solutions
ADAS Systems Redefine the Driving Experience: Connectivity Is Key
Advanced Driver Assistance Systems (ADAS) are revolutionizing the traditional concept of driving. They not only enhance safety but also accelerate the shift toward Software-Defined Vehicles (SDVs). In this transformation, connectivity is no longer optional—it’s foundational.
Emerging technologies—such as high-performance computing platforms and dynamically upgradable software systems—are evolving vehicles into intelligent terminals capable of continuous learning and adaptation. Historically, functionality was tightly coupled with hardware and software, but today, features can be redefined long after the vehicle rolls off the production line. This paradigm shift is reshaping how engineers, suppliers, and manufacturers view the vehicle lifecycle.
As manufacturers strive toward achieving Level 5 autonomous driving, many are now using OTA (Over-The-Air) technology to transition vehicles from Level 1 to Level 3. This entire path is almost entirely software-driven.

The Computational Demands of Software-Defined Vehicles
To truly transition from hardware-defined to software-defined functionality, decoupling the software layer from hardware is essential. This architecture allows continuous updates on the same platform—provided the vehicle is connected.
However, challenges are inevitable. Vehicle hardware is typically fixed throughout its lifespan. This limitation forces engineers to over-specify components from the outset, resulting in increased costs. Mass production helps mitigate these expenses by spreading them across larger volumes.
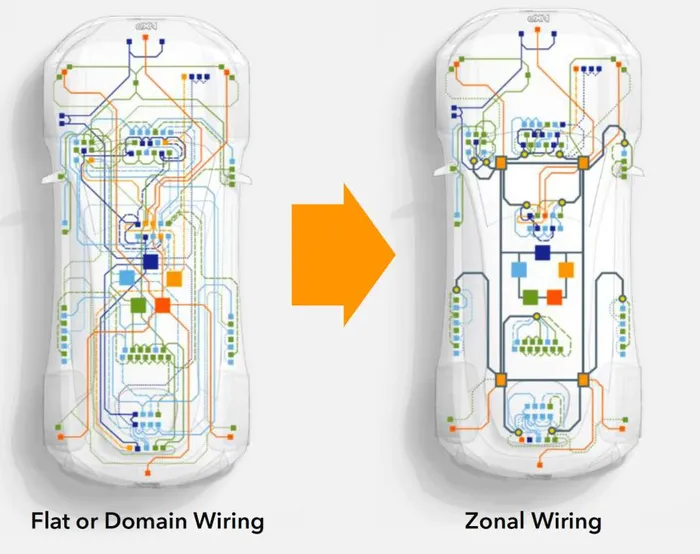
Manufacturers are increasingly adopting zonal architectures based on centralized High-Performance Computing (HPC). This approach reduces complexity by consolidating distributed ECUs. Virtualized environments like those developed by ETAS, combined with AUTOSAR Adaptive platforms, are replacing conventional wiring systems with streamlined, high-speed sensor data paths.
Reduced cabling translates to lower weight and complexity. As a result, the focus has shifted to high-speed data transmission between sensors and central processors. Radar sensors play a critical role by continuously feeding the HPC platform with vital environmental data to support ADAS decisions.

Evolving Data Protocols in Connected Vehicles
In connected cars, the data deluge is already a reality. Image sensors and onboard displays constitute the bulk of the vehicle's sensor data. While displays serve human users, image sensors act as the car’s “eyes,” powering autonomous algorithms.
Modern imaging systems employ visible light, infrared, and LiDAR to capture their surroundings. High-resolution camera systems, coupled with powerful processing algorithms, are becoming indispensable for both ADAS and higher levels of autonomous driving. As the industry pushes past Level 2 autonomy, image sensors will become critical enablers of vehicle perception.
By 2028, the bandwidth demand for radar and LiDAR sensors is expected to reach 1 Gb/s and 5 Gb/s, respectively. Level 3 vehicles typically require at least five radar and one LiDAR sensor. This number escalates to over 20 for Level 4, and up to 40 sensors for full Level 5 autonomy.
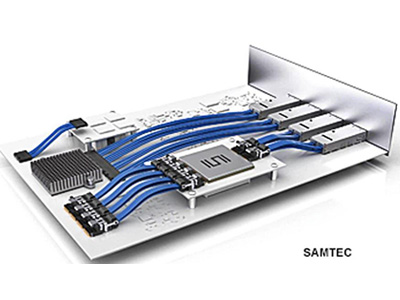
Zonal architectures demand that sensor data be aggregated and transmitted via high-bandwidth interfaces like 100BASE-T1 and 1000BASE-T1 Ethernet. Supporting protocols include both automotive-specific standards—MIPI, HDBaseT, APIX, FPD-Link, GSML—and general-purpose ones like PCIe.
In such high-speed environments, connectors must support transmission rates exceeding 10 GHz or even 20 GHz, while remaining reliable under harsh conditions. The explosion in imaging channels necessitates connectors with higher density, smaller footprints, and improved electromagnetic shielding. Hybrid-domain connectors—capable of carrying power and multiple data types within a single interface—are gaining ground.
Interconnect Innovation in the Zonal Era
Zonal architecture significantly reduces the weight and complexity of traditional wiring systems but dramatically increases dependency on high-speed networks. High-frequency data from radar and imaging sensors require meticulous impedance control at connection points.
Materials play a crucial role in this domain. Silver-plated copper reduces contact resistance and capacitance, lowering insertion loss. Optimized dielectric design minimizes electromagnetic interference and signal attenuation. Advanced electromagnetic simulation tools are now standard in developing high-performance interconnect solutions.
Meanwhile, numerous traditional low-bandwidth sensors—like those measuring temperature, pressure, fluid level, and tire pressure—still require extensive connectivity. Although their bandwidth needs are modest, their sheer volume makes traditional multipoint buses like CAN, LIN, and FlexRay more cost-effective than Ethernet.
Enter 10BASE-T1S. This Ethernet standard supports multiple nodes over a shared medium at low cost, with compatibility at the MAC layer and commercial implementations exceeding basic range and node requirements. It addresses the need to connect low-bandwidth sensors and actuators within zonal architectures.
Autonomy Becomes Collective: The Network Redefines Driving
The true meaning of a connected vehicle extends beyond cellular connectivity. Each car becomes an intelligent node within a vast, dynamic network.
These vehicles generate terabytes of radar data daily—not only for onboard computation but also for cooperative driving. Data on location, speed, and direction is shared across the network. In this context, “autonomous” is a misnomer. The future is about coordinated autonomy.
Advanced video protocols over Single Pair Ethernet and Gigabit Ethernet are enabling high-speed, low-latency, time-sensitive radar sensor networks. These are the building blocks of full autonomy.
Conclusion
The autonomous vehicle is not an isolated technological marvel but a dynamic participant in a hyperconnected ecosystem. From protocols and connector design to materials science and system architecture, interconnect solutions are the unsung heroes underpinning this revolution. Only with robust, scalable interconnect frameworks can the vision of autonomous mobility become a sustainable reality.
Shenzhen Gaorunxin Technology Co., Ltd